
| Présentation et Apprentissage l'Arduino Uno et des servo-moteurs La carte Arduino uno peut gérer 8 servos-moteurs.
|
| // Sweep // by BARRAGAN <http://barraganstudio.com> // This example code is in the public domain. #include <Servo.h> Servo myservo; // create servo object to control a servo // a maximum of eight servo objects can be created int pos = 0; // variable to store the servo position void setup() { myservo.attach(9); // attaches the servo on pin 9 to the servo object } void loop() { for(pos = 0; pos < 180; pos += 1) // goes from 0 degrees to 180 degrees { // in steps of 1 degree myservo.write(pos); // tell servo to go to position in variable 'pos' delay(15); // waits 15ms for the servo to reach the position } for(pos = 180; pos>=1; pos-=1) // goes from 180 degrees to 0 degrees { myservo.write(pos); // tell servo to go to position in variable 'pos' delay(15); // waits 15ms for the servo to reach the position } } |
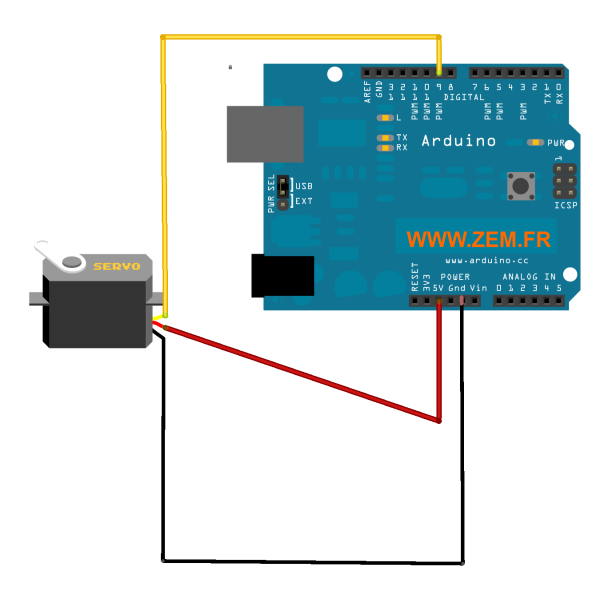
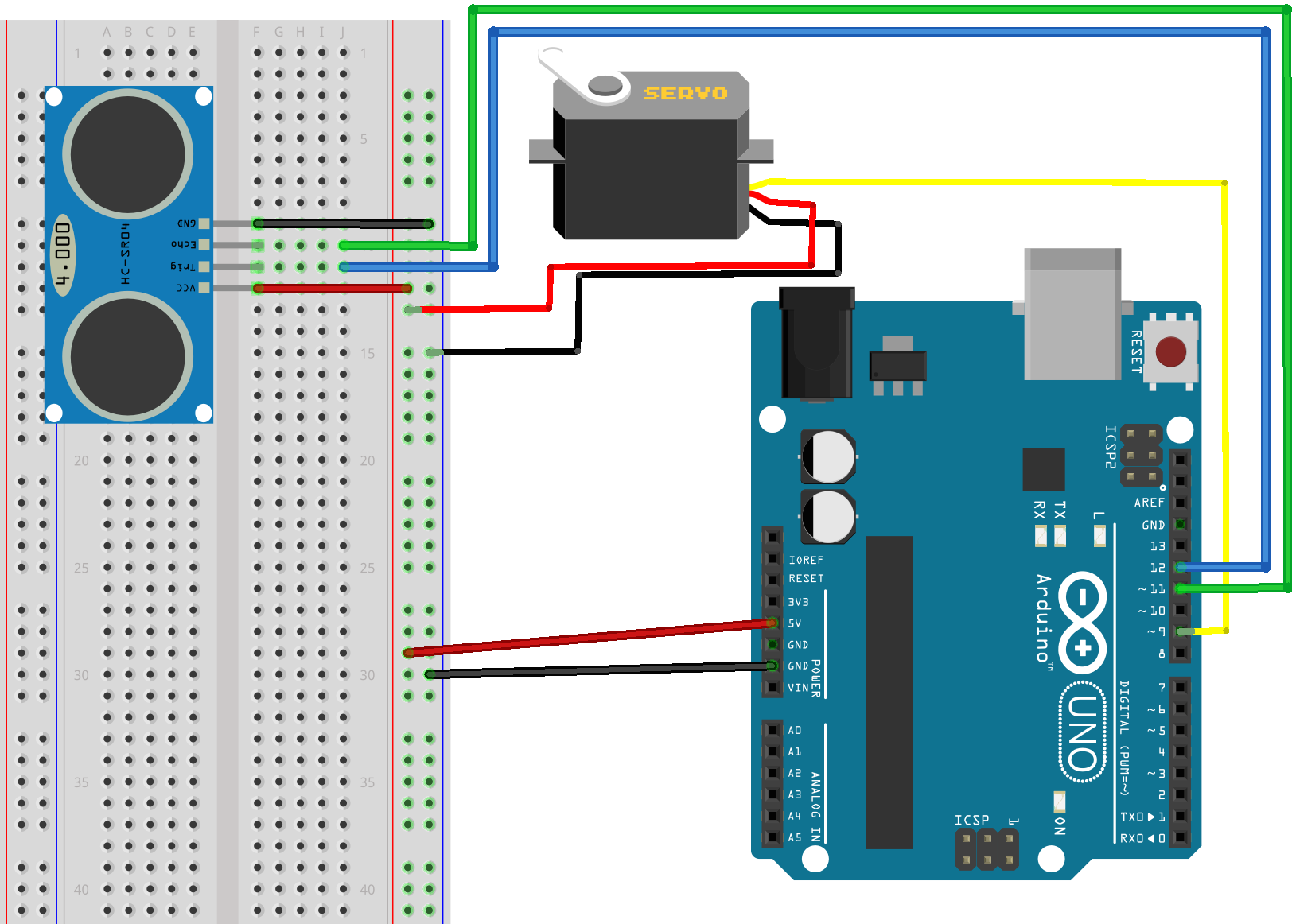
MONTAGE AVEC UN SERVO-MOTEUR
On alimente en 5V le capteur et le servomoteur (fil rouge du servomoteur et Vcc du capteur). Le fils noir du servomoteur ainsi que le GND du capteur sont reliés au ground (GND) d'arduino. Le dernier fils du servomoteur sera relié à la broche 9 : c'est par là que les commandes arrivent au servomoteur. La broche Trig du capteur sera reliée à l'entrée 12 et echo à 11.
LE CODE
| #include <Servo.h> Servo myservo; // crée l'objet servomoteur pour contrôler le servomoteur int pos = 0; // variable pour sauvegarder la position du servomoteur int etat = 0; // variable permettant de connaître la position du servomoteur //création des variables de gestion du capteur int trig = 12; int echo = 11; long lecture_echo; long cm; void setup() { pinMode(trig, OUTPUT); //gestion du capteur digitalWrite(trig, LOW); pinMode(echo, INPUT); myservo.attach(9); // On précise que le servomoteur utilise la broche 9 } void loop() { //récupération de la distance séparant un obstacle du capteur digitalWrite(trig, HIGH); delayMicroseconds(10); digitalWrite(trig, LOW); lecture_echo = pulseIn(echo, HIGH); cm = lecture_echo / 58; if((cm>25)&&!(etat==0)) { // si cette distance est plus grand que 25 cm et que le servomoteur n'est pas dans sa position 0 myservo.write(0); etat = 0; delay(1000); //On le met à la position 0 degrés } else if((cm>20)&&(cm<=25)&&!(etat==45)) { //si la distance est entre 20 et 25 cm et que le servomoteur n'est pas en position 45 degrés etat = 45; for(pos = 0; pos < 45; pos += 1) { myservo.write(pos); delay(15); } //on le met en position 45 degrés delay(1000); } else if((cm>15)&&(cm<=20)&&!(etat==90)) { //si la distance est entre 15 et 20 cm et que le servomoteur n'est pas à 90 degrés etat = 90; for(pos = 45; pos < 90; pos += 1) { myservo.write(pos); delay(15); } //On le met à 90 degrés delay(1000); } else if((cm>10)&&(cm<=15)&&!(etat==135)) { //Si la distance est entre 10 et 15 cm et que le servomoteur n'est pas à 135 degrés etat = 135; for(pos = 90; pos < 135; pos += 1) { myservo.write(pos); delay(15); } //On le met à 135 degrés delay(1000); } else if((cm<=10)&&!(etat==180)) { //Si la distance est inférieur à 10 cm et que le servomoteur n'est pas 180 degrés etat = 180; for(pos = 135; pos < 180; pos += 1) { myservo.write(pos); delay(15); } //On le met à 180 degrés delay(1000); } delay(1000); } |

